Alok Menghrajani
Currently: security consulting and lecturer.
Previously: security engineering at Square Block. Co-author of Hack (the programming language) and put the 's' in https at Facebook Meta. Maker of various CTF puzzles.
This blog does not use any tracking cookies and does not serve any ads. Enjoy your anonymity; I have no idea who you are, where you came from, and where you are headed to. Keep the dream of an Internet from times past alive.
Home | Contact me | Github | RSS feed | Consulting services | Tools & games
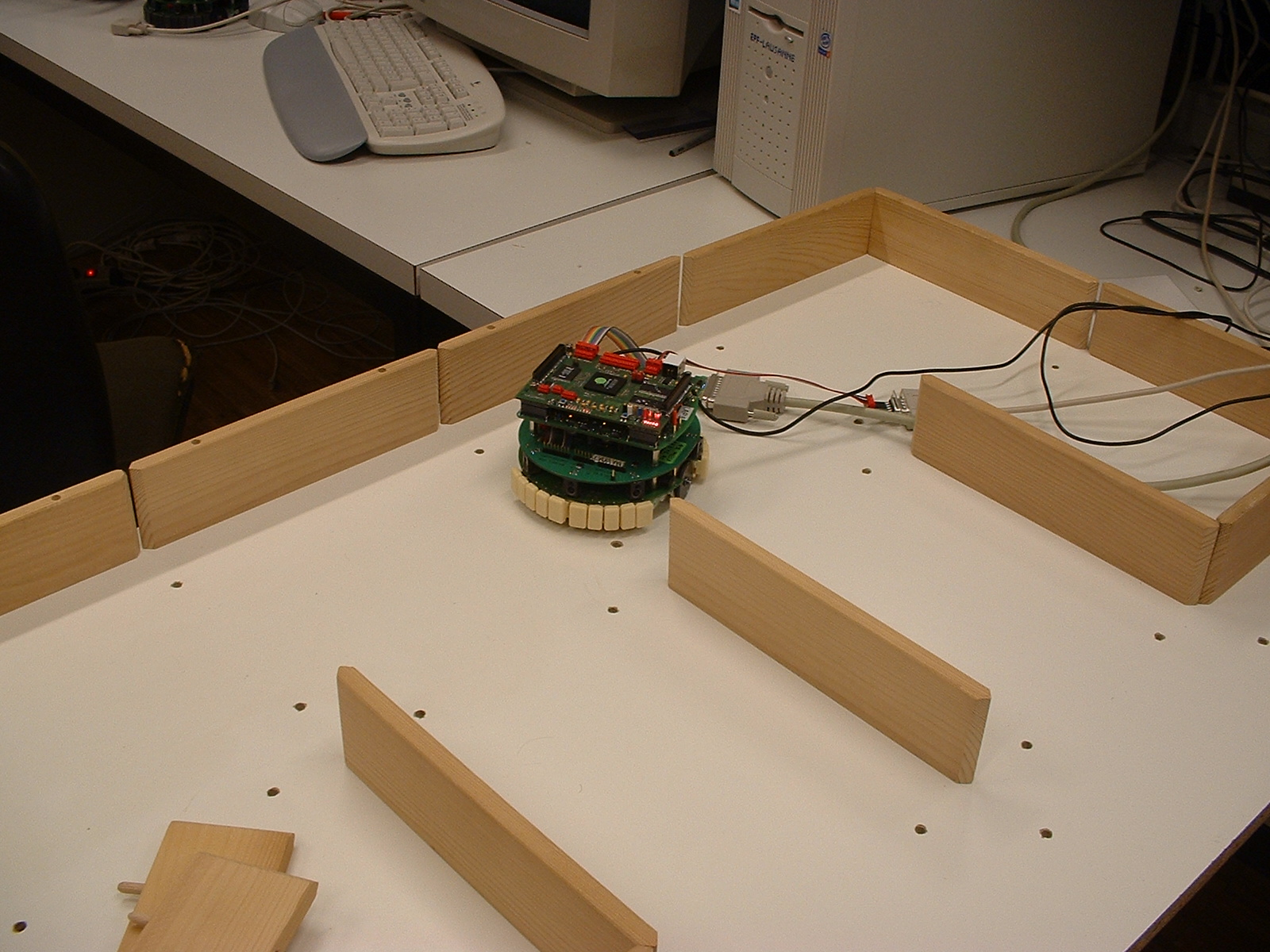
As part of the real time embedded systems course, we designed a robot that explores a maze. This was a two student group project; I worked with Joel Dumas.
We used Cyclope, a RokEPXA based robot developed at the LAP. This robot has two wheels (each controlled independantly, allowing us to rotate the robot by spinning the motors in opposite directions). We used infrared sensors to detect walls.
We control the robot's fundamental functions (like sending signals to the motors, or reading the sensors) by programming a FPGA (in VHDL). We wrote the higher level behavior (AI to handle maze navigation) in C language.
At the end of the course we had a little competitions with our fellow students to see who had designed the best robot. We did very well in the first round, but faced some problems in the second round.